ZLTECH 24V-36V 5A DC eléctrico Modbus RS485 controlador de motor sin escobillas para AGV


















FUNCIÓN Y USO
1 modo de ajuste de velocidad
Regulación de velocidad de entrada externa: conecte 2 terminales fijos del potenciómetro externo al puerto GND y al puerto +5v del controlador respectivamente.Conecte el extremo de ajuste al extremo SV para usar el potenciómetro externo (10K~50K) para ajustar la velocidad, o a través de otras unidades de control (como PLC, microcomputadora de un solo chip, etc.) ingrese voltaje analógico al extremo SV para realizar la regulación de velocidad (relativo a GND).El rango de voltaje de aceptación del puerto SV es DC OV a +5V, y la velocidad del motor correspondiente es de 0 a la velocidad nominal.
2 Control de marcha/parada del motor (EN)
El funcionamiento y la parada del motor pueden controlarse controlando el encendido y apagado del terminal EN relativo a GND.Cuando el terminal sea conductor, el motor funcionará;de lo contrario, el motor se detendrá.Cuando se utiliza el terminal de marcha/parada para detener el motor, el motor se detendrá de forma natural y su ley de movimiento está relacionada con la inercia de la carga.
3 Control de marcha adelante/atrás del motor (F/R)
La dirección de funcionamiento del motor puede controlarse controlando el encendido/apagado del terminal F/R y el terminal GND.Cuando F/R y el terminal GND no son conductores, el motor funcionará en el sentido de las agujas del reloj (desde el lado del eje del motor); de lo contrario, el motor funcionará en el sentido contrario a las agujas del reloj.
4 falla del controlador
Cuando ocurre sobretensión o sobrecorriente dentro del controlador, el controlador entrará en estado de protección y dejará de funcionar automáticamente, el motor se detendrá y la luz azul del controlador se apagará.El controlador liberará la alarma cuando se restablezca la terminal de habilitación (es decir, EN se desconecte de GND) o se apague la alimentación.Cuando ocurra esta falla, verifique la conexión del cableado con el motor o la carga del motor.
5 Puerto de comunicación RS485
El modo de comunicación del controlador adopta el protocolo Modbus estándar, que cumple con el estándar nacional GB/T 19582.1-2008.Usando la comunicación de enlace serial de 2 hilos basada en RS485, la interfaz física usa un puerto de cableado convencional de 3 pines (A +, GND, B-), y la conexión serial es muy conveniente.
Parámetros
| Conductor | ZLDBL4005S |
| Voltaje de entrada (V) | 24V-36V CC |
| Corriente de salida (A) | 5 |
| Método de control | Modobus RS485 |
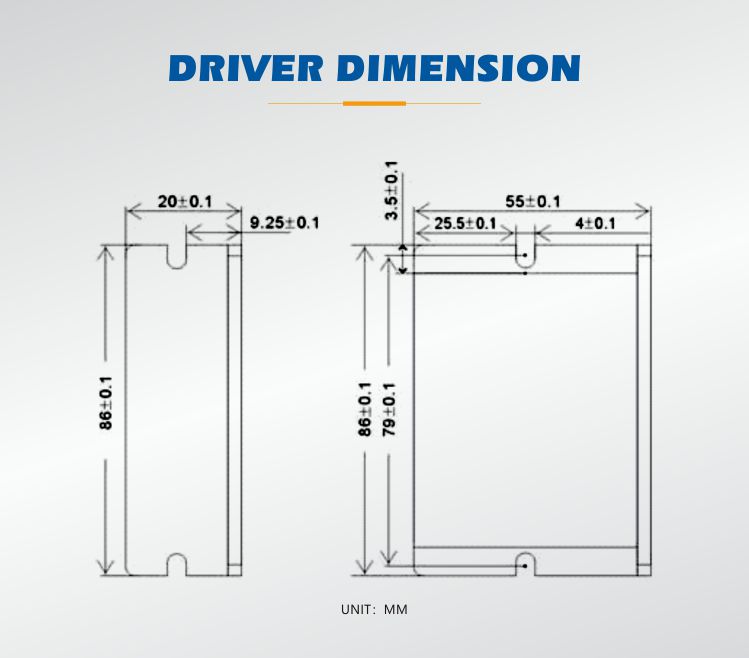
| Dimensión (mm) | 86*55*20mm |
| Peso (kilogramos) | 0.1 |
Dimensión
Solicitud

Embalaje

Dispositivo de producción e inspección

Calificación y Certificación

oficina y fábrica

Cooperación

Categorías de productos
-

2S86 ZLTECH 86 serie DC 36V 48V AC 27V-75V clo...
-

ZLTECH 24V-48V 30A Canbus Modbus de doble canal D...
-

ZLTECH 15inch 200kg DC motor de cubo sin escobillas con...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V paso integrado...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 57mm Nema23 motor paso a paso integrado con d...





