Controlador de servomotor ZLTECH 24V-48V DC 30A CAN RS485 para máquina CNC





El servocontrolador es una parte importante del control de movimiento moderno y se usa ampliamente en equipos de automatización, como robots industriales y centros de mecanizado CNC.La tecnología de servoaccionamiento, como una de las tecnologías clave para el control de máquinas herramienta CNC, robots industriales y otra maquinaria industrial, ha recibido una gran atención en los últimos años.
El servocontrolador utiliza un procesador de señal digital (DSP) como núcleo de control, que podría realizar algoritmos de control más complejos y realizar digitalización, redes e inteligencia.Al mismo tiempo, tiene circuitos de detección y protección de fallas que incluyen sobretensión, sobrecorriente, sobrecalentamiento, subtensión, etc.
El control del servocontrolador se divide en bucle de posición, bucle de velocidad y bucle de corriente de acuerdo con su objeto de control desde el exterior hacia el interior.En consecuencia, el servocontrolador también puede admitir el modo de control de posición, el modo de control de velocidad y el modo de control de par.El modo de control del controlador se puede dar de cuatro maneras: 1. Configuración de cantidad analógica, 2. Configuración interna de configuración de parámetros, 3. Configuración de pulso + dirección, 4. Configuración de comunicación.
La aplicación de la configuración interna de la configuración de parámetros es relativamente poca, y es limitada y ajustada por pasos.
La ventaja de usar la configuración de cantidad analógica es la respuesta rápida.Se utiliza en muchas ocasiones de alta precisión y alta respuesta.Su desventaja es que no hay deriva, lo que trae dificultades para la depuración.Los servosistemas europeos y americanos utilizan principalmente este método.
El control de pulso es compatible con los métodos de señal comunes: CW/CCW (pulso positivo y negativo), pulso/dirección, señal de fase A/B.Su desventaja es la baja respuesta.Los servosistemas japoneses y chinos utilizan principalmente este método.
La configuración de comunicación es actualmente el método de control más utilizado.Sus ventajas son fraguado rápido, respuesta rápida y planificación de movimiento razonable.El modo común de configuración de comunicación es la comunicación por bus, lo que simplifica el cableado, y el protocolo de comunicación diversificado también brinda a los clientes más opciones.
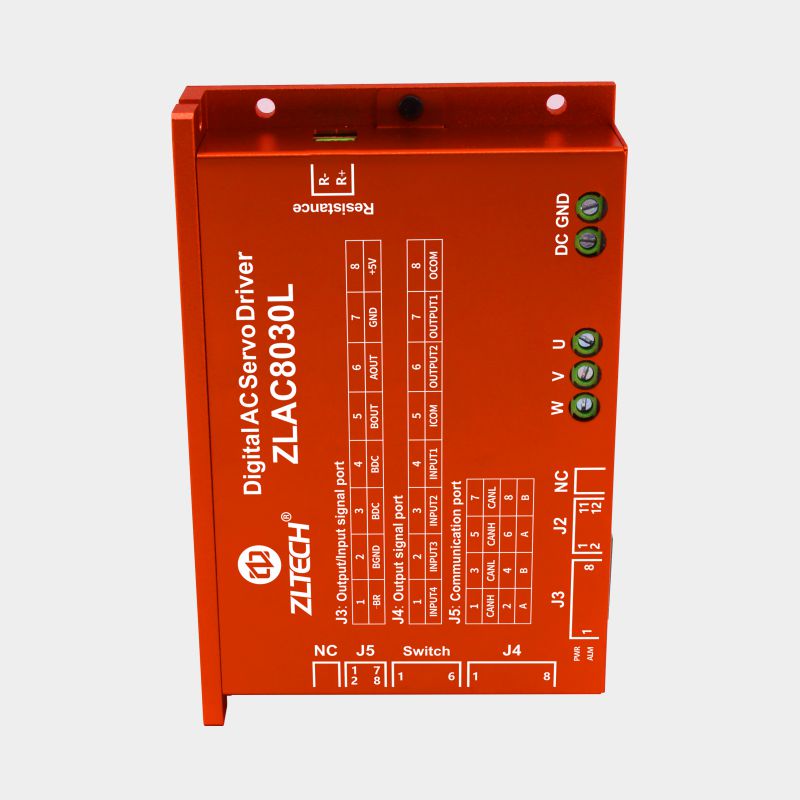
ZLAC8030 es un servocontrolador digital de alta potencia y bajo voltaje desarrollado de forma independiente por ellos mismos.Su sistema tiene una estructura simple y alta integración.Agrega comunicación de bus y funciones de controlador de un solo eje.Se combina principalmente con servomotores de 500W-1000W.
Parámetros
| NOMBRE DEL PRODUCTO | CONDUCTOR SERBO |
| N/P | ZLAC8030L |
| TENSIÓN DE TRABAJO (V) | 24-48 |
| CORRIENTE DE SALIDA (A) | NOMINAL 30A, MAX 60A |
| MÉTODO DE COMUNICACIÓN | CANOPEN, RS485 |
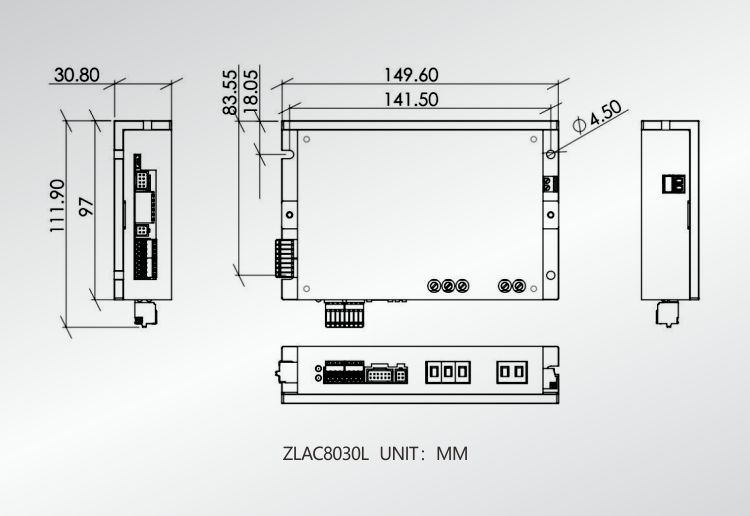
| DIMENSIÓN (mm) | 149,5*97*30,8 |
| SERVOMOTOR DE CUBO ADAPTADO | SERVOMOTOR DE CENTRO DE ALTA POTENCIA |
Dimensión
Solicitud

Embalaje

Dispositivo de producción e inspección

Calificación y Certificación

oficina y fábrica

Cooperación

Categorías de productos
-

ZLTECH trifásico 60mm Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen integrado...
-

ZLTECH 6.5 pulgadas 24V-48V 150W 120kg BLDC eléctrico...
-

ZLTECH 9.5inch 48V 20N.m hub motor para agricultura...
-

Codificador ZLTECH Nema23 CANopen paso a paso integrado...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V paso integrado...





