ZLTECH 3 fases 60mm Nema24 24V 100W/200W/300W/400W 3000RPM BLDC motor para máquina de impresión








Un motor eléctrico de CC sin escobillas (BLDC) es un motor eléctrico alimentado por un suministro de voltaje de corriente continua y conmutado electrónicamente en lugar de escobillas como en los motores de CC convencionales.Los motores BLDC son más populares que los motores DC convencionales hoy en día, pero el desarrollo de este tipo de motores solo ha sido posible desde la década de 1960 cuando se desarrolló la electrónica de semiconductores.
Similitudes motores BLDC y DC
Ambos tipos de motores constan de un estator con imanes permanentes o bobinas electromagnéticas en el exterior y un rotor con bobinados que pueden ser alimentados por corriente continua en el interior.Cuando el motor funciona con corriente continua, se creará un campo magnético dentro del estator, ya sea atrayendo o repeliendo los imanes en el rotor.Esto hace que el rotor comience a girar.
Se necesita un conmutador para mantener el rotor girando, porque el rotor se detendría cuando estuviera alineado con las fuerzas magnéticas en el estator.El conmutador cambia continuamente la corriente continua a través de los devanados y, por lo tanto, también cambia el campo magnético.De esta manera, el rotor puede seguir girando mientras el motor esté alimentado.
Diferencias motores BLDC y DC
La diferencia más destacada entre un motor BLDC y un motor DC convencional es el tipo de conmutador.Un motor de CC utiliza escobillas de carbón para este propósito.Una desventaja de estos cepillos es que se desgastan rápidamente.Es por eso que los motores BLDC usan sensores, generalmente sensores Hall, para medir la posición del rotor y una placa de circuito que funciona como un interruptor.Las mediciones de entrada de los sensores son procesadas por la placa de circuito que cronometra con precisión el momento adecuado para conmutar a medida que gira el rotor.
Parámetros
| Artículo | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| Fase | 3 fases | 3 fases | 3 fases | 3 fases |
| Tamaño | Nema24 | Nema24 | Nema24 | Nema24 |
| Voltaje (V) | 24 | 24 | 48 | 48 |
| Potencia nominal (W) | 100 | 200 | 300 | 400 |
| Corriente nominal (A) | 5.5 | 11.5 | 8.3 | 12 |
| Corriente máxima (A) | 16.5 | 34.5 | 25 | 36 |
| Par nominal (Nm) | 0.32 | 0,63 | 0,96 | 1.28 |
| Par máximo (Nm) | 1 | 1.9 | 3 | 3.84 |
| Velocidad nominal (RPM) | 3000 | 3000 | 3000 | 3000 |
| No. de Polos (Pares) | 4 | 4 | 4 | 4 |
| Resistencia (Ω) | 0.22±10% | 0,59±10% | 0.24±10% | |
| Inductancia (mH) | 0.29±20% | 0,73±20% | 0,35±20% | |
| Ke (RMS)(V/RPM) | 4.2x10-3 | 4.2x10-3 | 8.3x10-3 | 8.5x10-3 |
| Inercia del rotor (kg.cm²) | 0.24 | 0.48 | 0.72 | 0,96 |
| Coeficiente de par (Nm/A) | 0.06 | 0.06 | 0.09 | 0.12 |
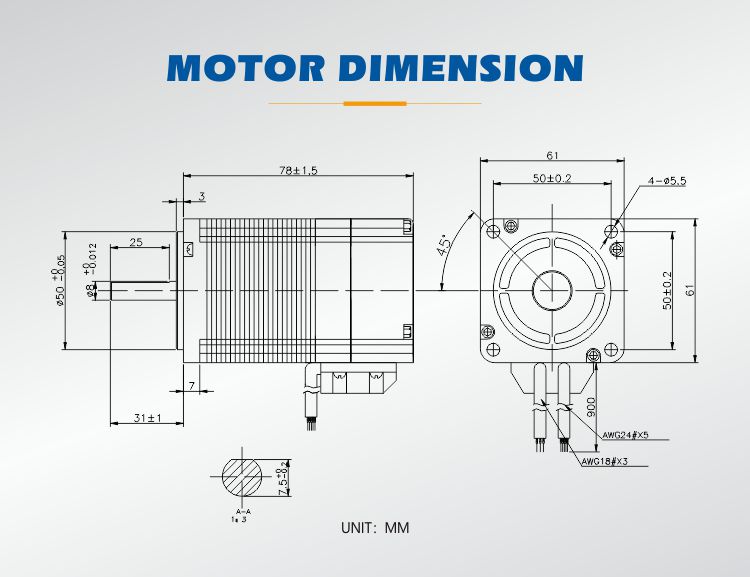
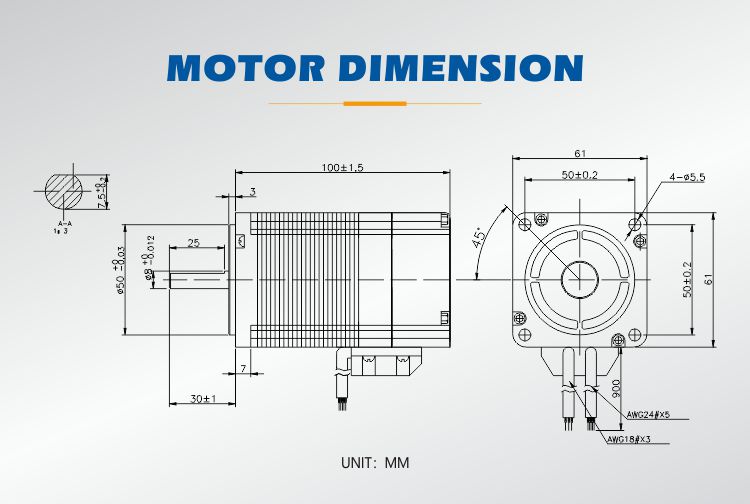
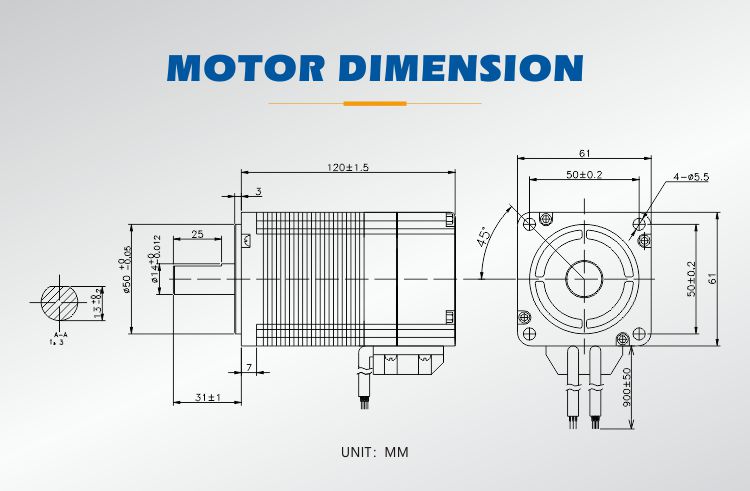
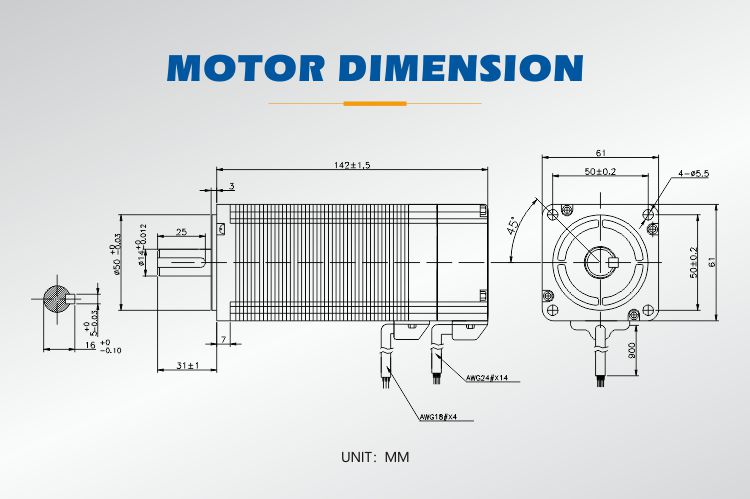
| Diámetro del eje (mm) | 8 | 8 | 14 | 14 |
| Longitud del eje (mm) | 31 | 30 | 31 | 31 |
| Longitud del motor (mm) | 78 | 100 | 120 | 142 |
| Peso (kg) | 0.85 | 1.25 | 1.5 | 2.05 |
| Controlador BLDC adaptado | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
Dimensión
Solicitud

Embalaje

Dispositivo de producción e inspección

Calificación y Certificación

oficina y fábrica

Cooperación

Categorías de productos
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A paso a paso...
-
M4040 ZLTECH 2 fases 12V-40V DC 0.5A-4.0A cepillo...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V paso integrado...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC eléctrico Modbus RS485 cepillo...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie lazo cerrado...





